










![[表情_开心]](https://img.tapimg.com/market/images/48516f625646b5ea2c66f0cab3c9c52a.png)




![[表情_微笑]](https://img.tapimg.com/market/images/0f170d4b1ecf80c267e5a44b5992a199.png)














![[表情_狗头]](https://img.tapimg.com/market/images/a5aee440f53d1d44bf40658f0983769e.png) ,所以我将用我的思路带来一份比较详细的攻略,希望能够帮助大家对这关有更深的认识。
,所以我将用我的思路带来一份比较详细的攻略,希望能够帮助大家对这关有更深的认识。




个人自制关卡攻略
本贴仅记录个人关卡解法
01 害羞的士兵
简单的关卡没啥好说的。
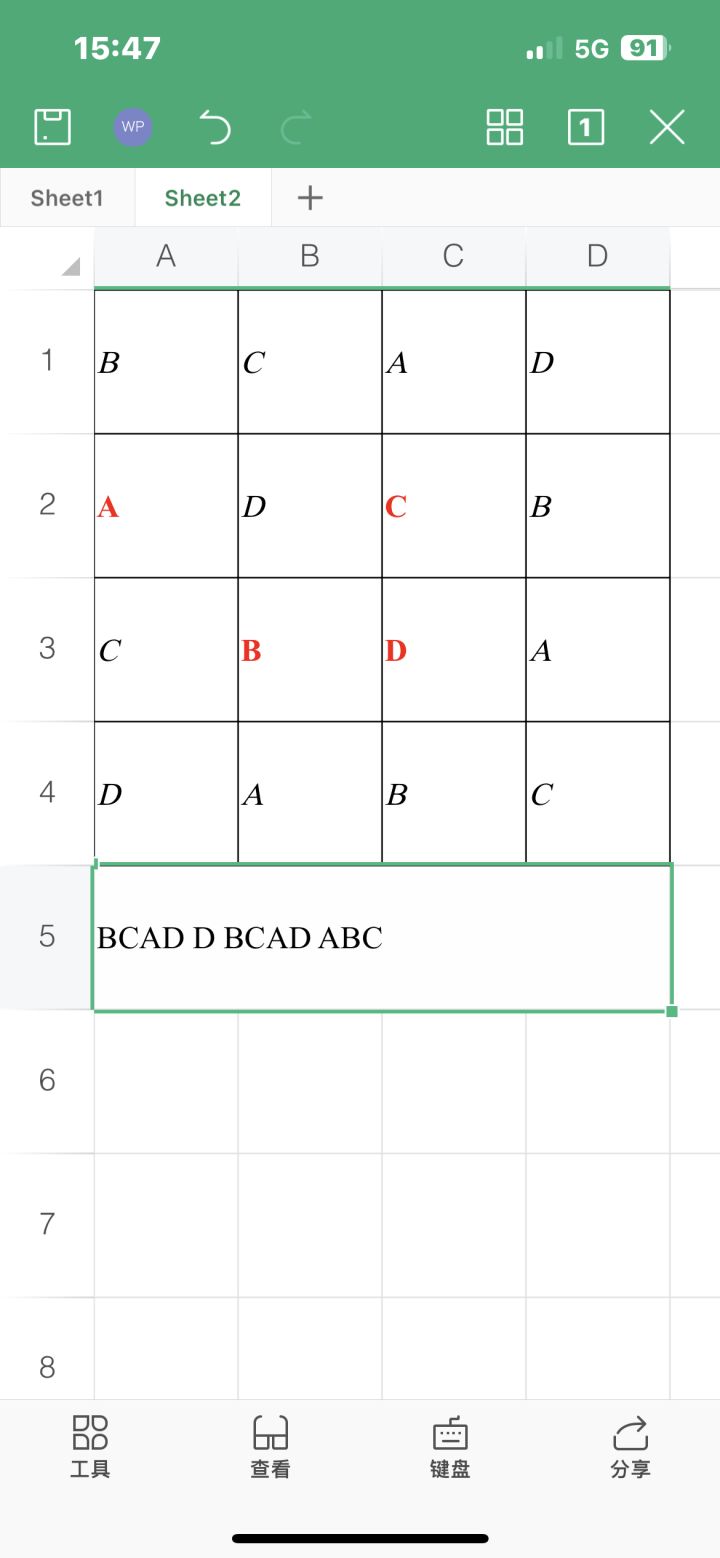
第一行ABGFEZ,第三行EDCB。
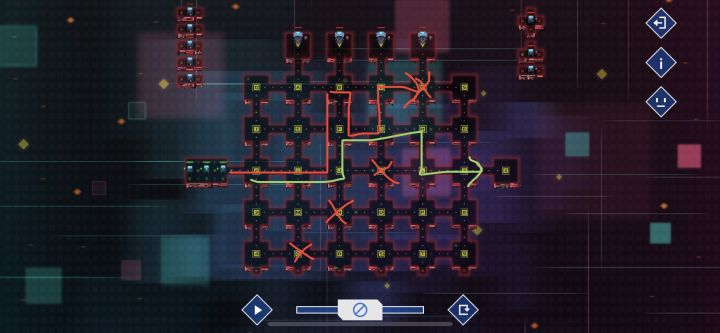
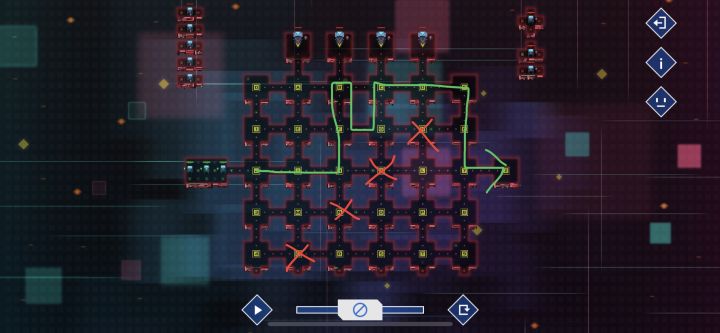
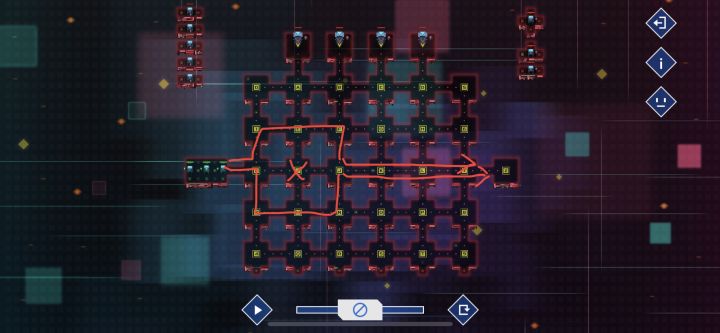
02 尾行
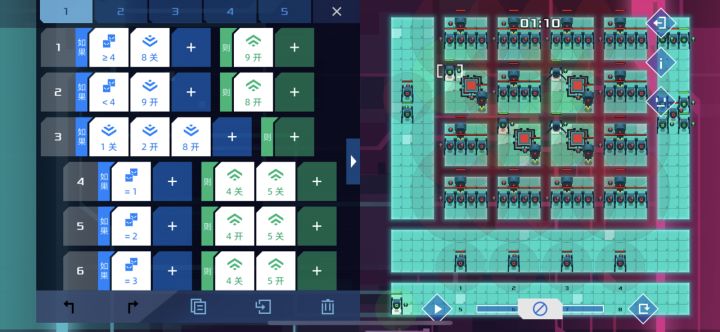
利用了优先级与惯性原理,方法是先向右走,等脱离了敌方视野再开始开枪,这样才能多打中敌人一枪,此外,加上Z>10才站立的限制是因为倒数第二时敌人已经比你快了很多了,会脱离我方视野,如果不加我方会触发站立,导致最后一枪够不到敌人,加上限制后,我方会继续往右走补上视野外的最后一枪
三种三行

81
:
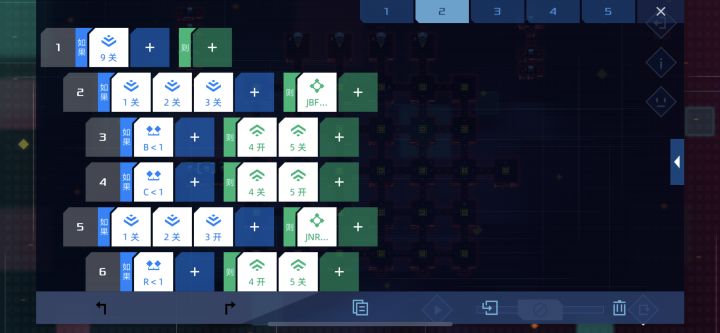
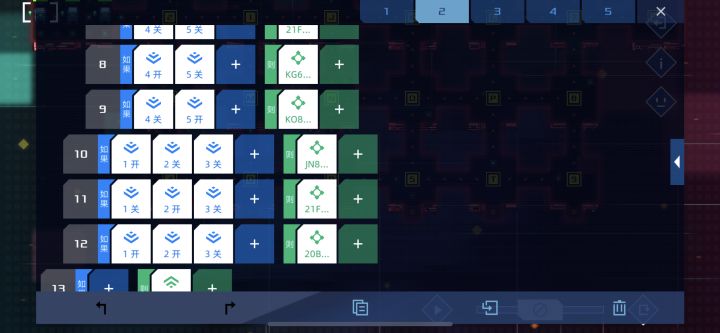
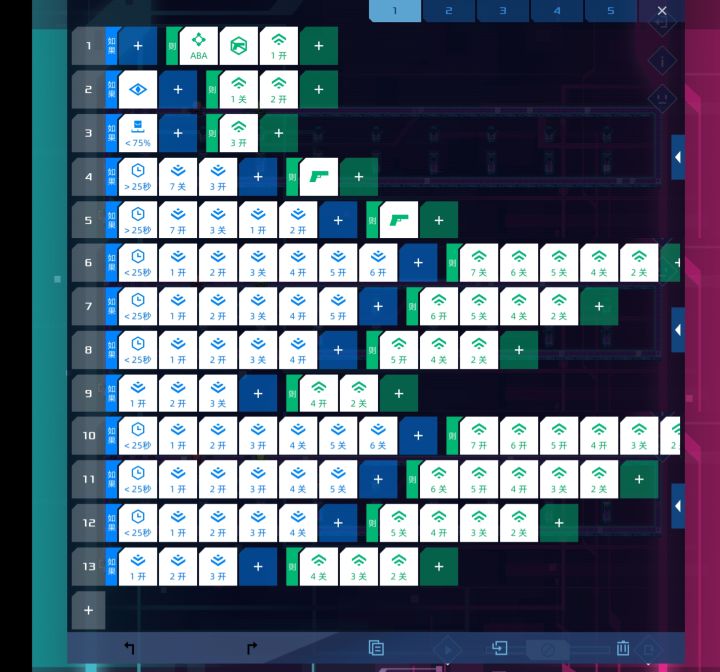
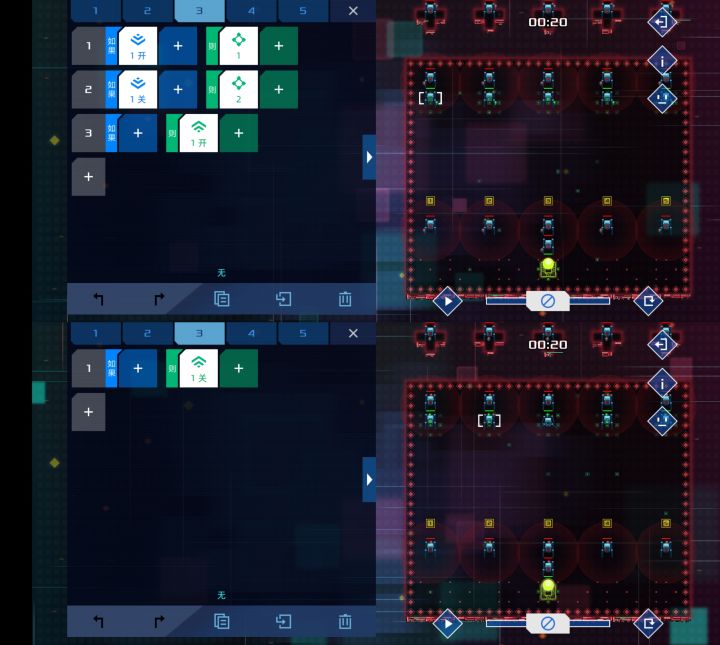
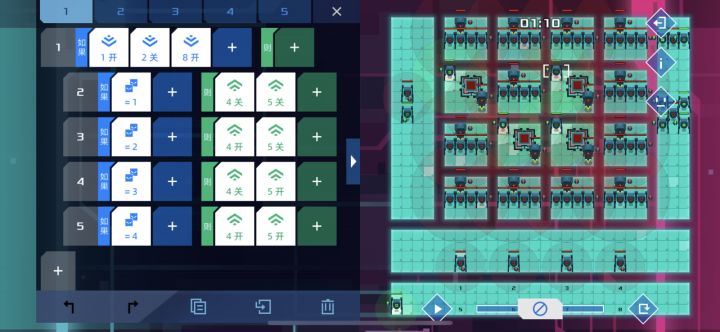
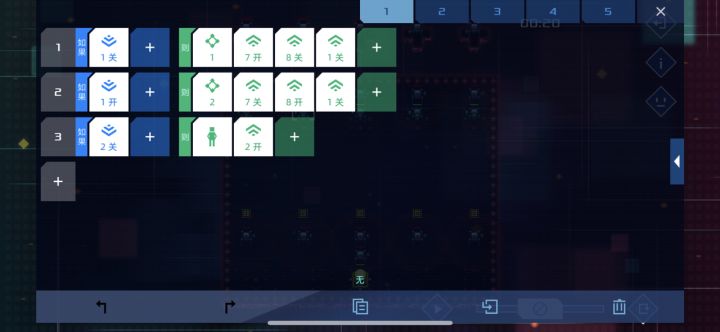
二人转的奇偶计数解法(16行,信号少)信号1, 2保证发现敌人5后只转向一次信号3记录顺逆方向信号3, 4, 5记录当前位置第四行检测敌人1,是为了避免短时间内多次发现敌人5导致多次转向的问题
图片 :
[TapFamily_爱了]有没有时间偶尔一起讨论下编程,先声明我只会点c++基础,指针什么的都属于一脸懵逼,不过我喜欢用编程算一些东西感觉很有趣